
Tässä lennokkikerhon nettisivun asiayhteydessä dronet tarkoittavat ns. neli- tai useampimoottorisia potkurilla lentäviä etäohjattavia lentolaitteita.
Mekatroniikkaa, ihanaa mekatroniikkaa! Kaikki lennokkilajit nykyisin yhdistävät mekatroniikan kolme pyhää: mekaniikka, elektroniikka sekä tietotekniikka. Tämä sitten tietenkin yhdistetään aerodynamiikkaan, meteorologiaan, säännöksiin jne… kyllä siitä hyvä soppa tulee. Dronet ovat muihin lennokkilajeihin verrattuna hyvin tietotekniikkapainotteinen laji.
Drone määritelmänä ei ole selvä. Sillä voidaan tarkoittaa yleisesti kaikkia miehittämättömiä ilma-aluksia (unmanned aviation vehicles UAV), eli lennokeita. Ne edelleen jakaantuvat etäohjattuihin järjestelmiin sekä itsenäisesti tehtävään kykeneviin droneihin jotka toimivat joko yksin tai ryhmässä. Dronet voivat olla siis ns. kiinteäsiipisiä tai pyöriväsiipisiä, jotka perinteisesti jaetaan vieläpä nelikoptereihin joissa on neljä tai useampi moottori sekä helikopterimallisiin droneihin. Jaottelun tuskaa ei helpota yhtään droneteknologian kehitys eteenpäin: eri tekniikoita yhdistellään ja on olemassa esimerkiksi kiinteäsiipisiä droneja jotka nousevat potkurin varassa ylös, mutta siirtyvät (transitio) lentovaiheen ajaksi lentämään siiven avulla. Laskeutuminen suoritetaan, noh, nelimoottorisena potkureiden varassa leijuen, perinteisesti siiven varassa laskeutuen, laskuvarjolla tai lennokki kaapataan lennosta apuvälineen avulla.

Alkuaikoina droneja lennätettiin perinteisesti ulkoapäin katsoen lennokkityyliin. Langattomat videokamerat yleistyivät kuitenkin hyvin nopeasti ja droneja alettiin lentämään pääsääntöisesti pieneltä näytöltä katsoen tai videolaseilla. Tätä lennätysmuotoa kutsutaan FirstPersonVideo -nimellä eli FPV-lennätys. Videolasien tuoma immersio eli kokemus lentämisestä on aika voimakas. Tästä syystä erityisesti aloittelevia FPV-lennättäjiä suositellaan lennättämään ainakin ensimmäiset lentonsa istualteen.

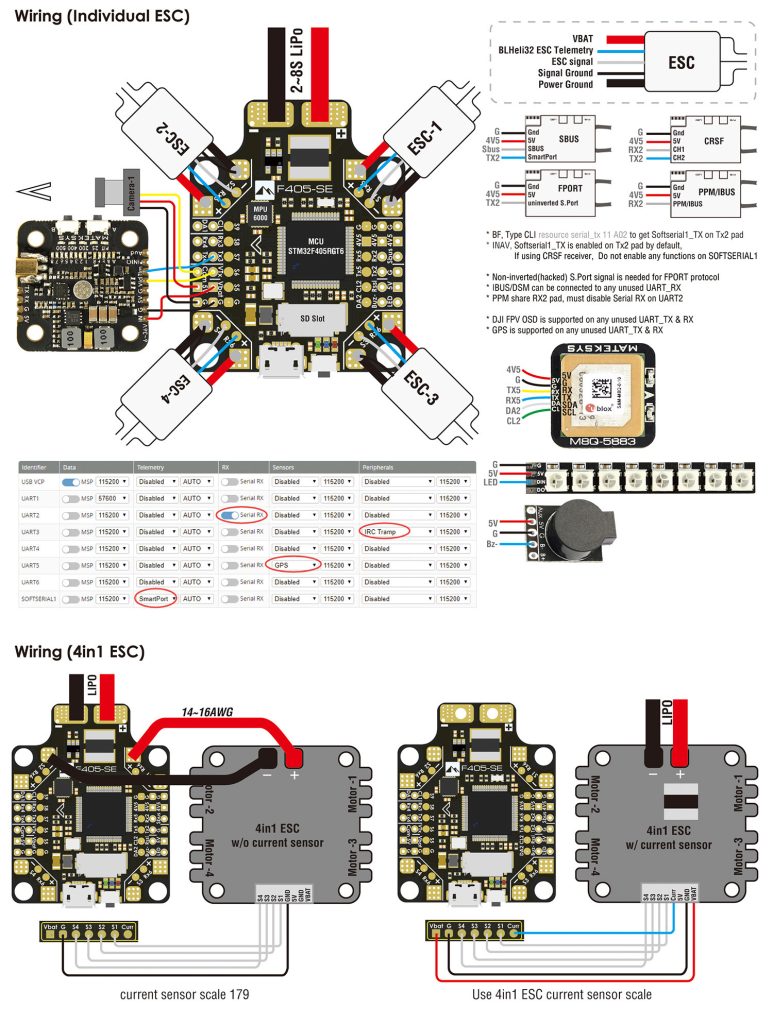
Nelikopteri, kavereiden kesken drone, ei ole itsessään aerodynaamisesti vakaa lentolaite siivellisen lennokin tyyliin. Se vaatii toimiakseen lentotietokoneen, jota kutsutaan FlightControlleriksi (FC tai autopilotti). Drone saa käskynsä (ohjauskäskyt, lentotilat jne) radio-ohjauslaitteistolta. FC yhdistää ohjauspyynnöt tietoon lennokin asennosta, kiihtyvyydestä, nopeudesta, korkeudesta jne. Tämän jälkeen FC käskee moottoreita nopeudensäätimien (ESC) avulla kiihdyttämään tai hidastamaan moottoreita joka saa aikaan halutun asennon, liikkeen tai paikan. Paikkatietoa drone saa pääsääntöisesti ilmanpaineella toimivasta korkeusanturista GPS:stä, gyroista sekä inertiasensoreista. Tämän avulla drone voidaan pysäköidä paikalleen, laittaa lentämään haluttu reitti tai vaikkapa palauttaa automaattisesti lähtöpisteeseensä.
Itse rakennetuissa FlightControllereissa on ohjelmisto, eli softa, joka toimii lennokin älynä yhdistäen edellämainitut tiedot. Tällä hetkellä kolme suosittua ilmaista järjestelmää ovat INAV, BetaFlight sekä ArduPilot. Kaupallisissa järjestelmissä on yleensä valmistajan omat ohjelmistot sisällä.


Droneja voidaan jaotella eri tyyleillä. Yksi tapa hahmotella sitä, on jakaa ne eri painoluokkiin. Alla eri kokoluokkia ja lyhyt kuvaus niistä
Whoopit (65mm)
- Paino 20-35g
- Halpoja
- Soveltuu sisällä lennättämiseen
- Voidaan lentää ulkona tyynessä tai kevyessä tuulessa
Racingdrone / freestyle drone
- Yleensä 5″ kokoisia eli noin 250mm moottorista moottoriin
- Käytetään freestyle-lennätykseen sekä ratalennätykseen.
- 5-6″ potkurit
- Paino noin 400-800g
- Nopeus noin 150-180 km/h

Isot Dronet
- Yli 5″ kokoiset dronet alkavat olemaan jo harvinaisempia tavallisessa harrastekäytössä
- Kykenevät nostamaan hyötykuormaa useita kiloja ilmaan
- Vaatii pidemmän harrastuskokemuksen jotta toiminta on turvallista

Muut tavat luokitella ovat esimerkiksi kamera/ohjausperusteisesti:
Kuvausdrone

Kuvausdronella tarkoitetaan yleensä nelikopteria, joka itsessään on vakautettu ja pysyy paikallaan korkeuden ja paikan suhteen kun ohjaustikuista päästetään irti. Kallistuksen maksimikulma on määritelty ohjelmassa ja dronea ei pysty ohjaamalla saada ylösalaisin.
- Ilmakuvaukseen käytettävä drone, jossa on sopiva joko valmistajan oma tai jälkiasennettu kamera.
- Kamera on yleensä gyrostabiloitu, eli kamera pysyy suorassa vaikka lennokki kallistelee.
- Sopii harrasteluun tai ammattimaiseen ilmakuvaukseen.
- Esim. DJI Mavic.
FPV-drone

Oleellinen ero FPV-dronen ja ns. kuvauskopterin välillä on vapaus ohjauksessa ja tehoissa. Näissä koptereissa asentoa, tehoa tai paikkaa ei rajoiteta. Siksi lentäminen vaatii jatkuvaa ohjausta. Drone jää siihen asentoon missä se sillä hetkellä on, kun ohjaus lopetetaan (oikeinpäin, kallelleen tai jopa ylösalaisin). Siksi sen opettelu vaatii huomattavasti kamerakopteria enemmän aikaa. Yleensä FPV-dronen moottorien tehot ovat isoja sekä rajoittamattomia. Tämän hallintakin vaatii lennättäjältään enemmän osaamista. Asiaa voisi verrata perinteinen perheauto vs. Formula -ajattelumalliin. Toisaalta FPV-dronen vapaus mahdollistaa temppujen tekemisen ja täyden hallinnan liikkeiden suhteen. Siksi se miellyttää monia, joille lentämisen vapaus on tärkeää.
- Kamera kiinteä ja osoittaa eteenpäin tai etuyläviistoon
- FPV dronea käytetään yleensä freestyle -tyyliseen lentämiseen tai kisa-ajamiseen porttien läpi
- Lentomoodina yleensä käytetään ”Acro modea”. Tällöin drone jää siihen asentoon missä se on, kun ohjaaminen lopetetaan.
- Lennätystaidon oppiminen vaatii enemmän kuin ns. kameradroonin opettelu, koska FPV dronea pitää ohjata koko ajan.
Kirjoittaja: Jussi Kakko
Oikolukija: Heidi Kakko